Omdat Astrofotografie geen goedkope hobby is, heb ik me voorgenomen om te kijken of je met goedkoper materiaal ook mooi resultaat kan bereiken.
Overzicht van het materiaal:
EQ5 met motoren (kan via ST4 of via een EQmod kabel) (500 – 750 EUR)
Telescoop 150f5 of Skywatcher ED100 (300 EUR + 250 EUR/flattener)
Camera SV Bony 705c, bevat de 585MC CCD ideaal voor planeten/DSO (400 EUR)
Kstars/Ekos/PHD2 software (gratis)
Mini-PC met 12V (120 EUR)
Volgcamera (250 EUR)
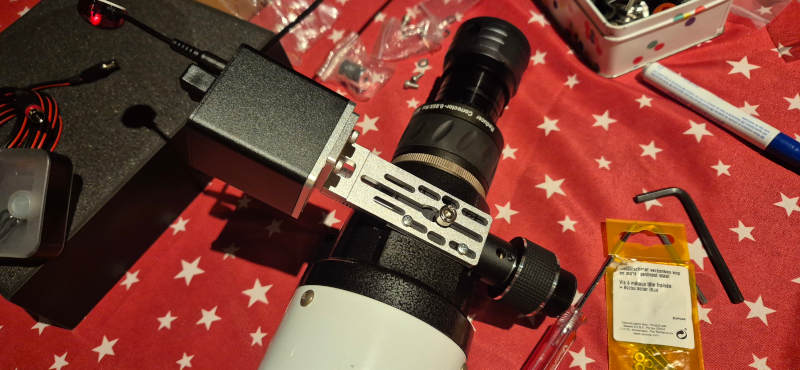
EAP Gemini focuser (105 EUR)
Totale kost van de installatie: 1.930 EUR
Merk op dat de EAP Gemini focuser een full option was. Deze omvat ook een temperatuursensor en IR afstandsbediening. Het basis baket kost maar 80 EUR maar was niet te verkrijgen.
Door een kado-bon op Amazon, ben ik nu eigenaar van 2 verschillende 585MC camera’s.
Camera 1 is de PlayerOne Uranus C pro en camera 2 is een SVBony 705c. De PlayerOne staat op mijn Nexton 200f4 terwijl de SVBony vooral bedoeld is als een lichtgewicht grab-and-go voor mijn andere telescopen.
Terwijl de PlayerOne met koeling, dauwprotectie en USB poorten komt, is de SVBony enkel voorzien van een ST4 guide poort. De prijs is dan ook 750 EUR tov 400 EUR.
Toch moet ik hierbij opmerken dat ik de eerste SVBony 705c heb teruggestuurd wegens stof op de CCD en zelf de vervangende SVBony 705c had dit probleem. Op aangeven van SVBony FR heb ik de rubber pasta zegel doorbroken (met veel kracht) en de voorkant verwijderd zodat ik zelf de CCD kon reinigen. Dat is toch een serieus tekort van SVBony. Een stofvrije montage zou toch mogelijk moeten zijn.
Hieronder kan je de opnames vinden van IC 1795 – The Fish Head Nebula op zaterdag 28 sept met de twee camera’s op 2 verschillende telescopen. Ik heb wel nog optische problemen met de GSO maar leek me leuk te delen.
Hierboven de PlayerOne met een dual band filter op de 200f4 met flattener. 96x 3 min = 5u opnames. Wel kan je links de problemen zien met de optische trein. Meer informatie lager in deze post.
De SVBony zonder filter op de Skywatcher ED100 met reducer/flattener. 66x 3 min = 3u opnames. De focus was blijkbaar niet perfect maar de SV705c is nu wel goedgekeurd. Wel kan je in de details duidelijk het verschil zien tussen de Newton en de Skywatcher. Door de 200mm vangt de Newton 4x zoveel fotonen (diameter in kwadraat) en de Newton is f4 tov f7.6 en we hebben 2u opnames meer op de Newton.
Probleem met de Newton
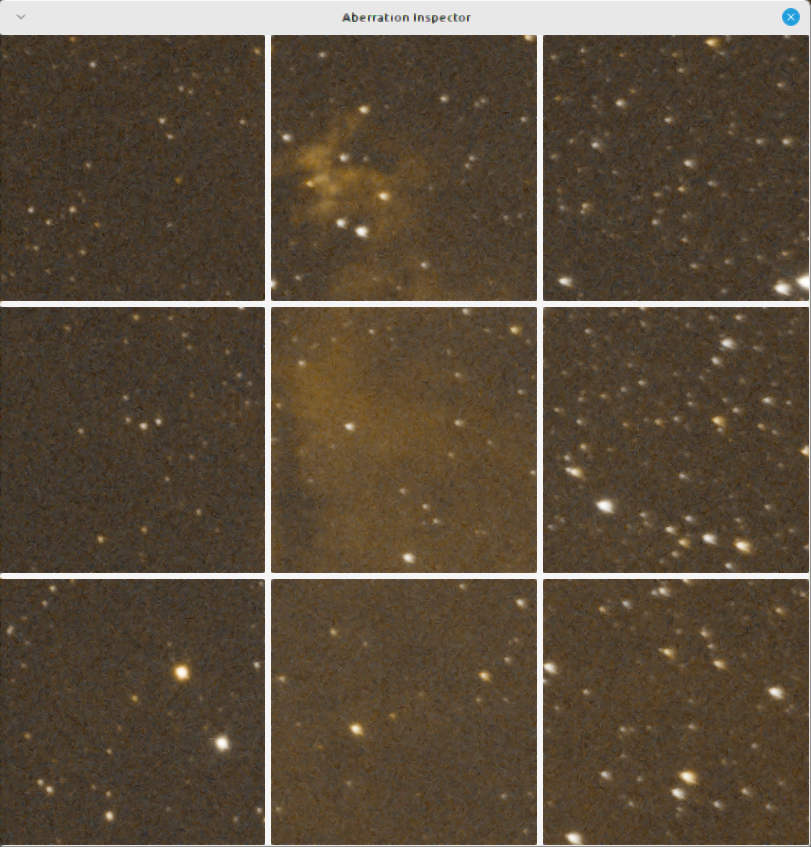
Sinds ik het observatorium heb verhuisd, heb ik problemen met de Newton. Eén zijde van de opnames vertoont zeer zware optische fouten. Hubert heeft me al geholpen in het opnieuw instellen van de secondaire vangspiegel (stond volledig verkeerd) en de collimatie. Zelf heb ik me vooral gesmeten op het vlakker zetten van de focuser. Hieronder kan je de aberraties zien waarbij ik rechts problemen zie met vooral uitsmeren naar de rechter zijde. Omdat ik die niet zie in de andere vensters, lijkt het me geen probleem van een verkeerde backfocus.
Update [29/09/24 21:45]: Bij het roteren van de camera op de flattener draait de fout mee. Het probleem zit dus in de optische trein achter de flattener. Iemand een idee hoe je best dit kan oplossen zonder noodzaak naar sterren? De PlayerOne heeft een standaard tiltplaat.
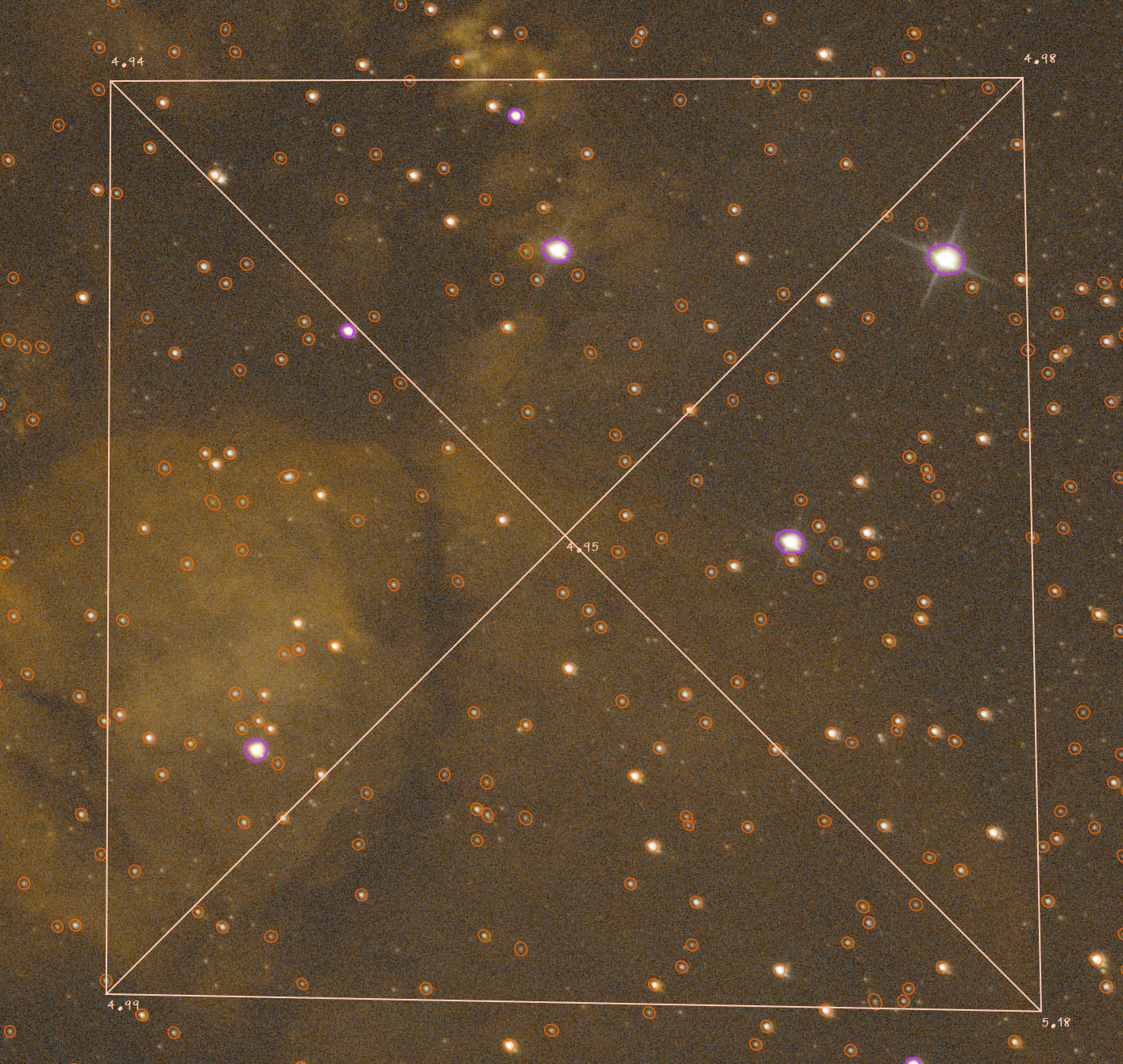
Een logisch probleem zou kunnen zijn dat de CCD geen vlak veld heeft. Na wat regelen op de focuser en de montage op de Newton, lijkt het beeldvlak wel goed vlak. Ideeen zijn welkom om dit probleem op te lossen. Collimatie en spiegels sluit ik intussen uit. Het beeldveld hieronder lijkt me toch wel ok.
Probleem met de SVBony 705c
Toen ik mijn eerste opnames deed, zag ik direct een “zwart gat” in de opname. Bij het controleren van de flats, bleek ik dus een mega stofdeeltje op de CCD hebben. Deze kon ik niet verwijderen en omdat de SV705C met een zwarte pasta is toegeplakt, kan je ook niet openen zonder schade (lees garantieverlies). Na contact op te nemen met Amazon voor terugsturen en SVBony, wordt de camera ingewisseld met een andere SV705c. Deze blijkt terug stof te hebben op de CCD maar wel in mindere mate. Omdat SVBony me had voorgesteld om de SV705c zelf te reinigen, ga ik ervoor en breek ik door de rubberen pasta om de sensor te reinigen.
Na reinigen van de sensor, zie ik nog imperfecties maar niks wat de opnames echt in de weg staat of met een flat niet kan opgelost worden. De opnames hoger in de post zijn zonder flats genomen met deze camera.
Moraal van het verhaal, SVBony camera’s lijken dus niet stofvrij op hun CCD ! Als je zelf niet weet hoe een CCD te reinigen, blijf dan ver weg van deze camera’s.
In een vorige blok heb ik de onderdelen verzameld voor het bouwen van een Allsky camera. Intussen zijn alle onderdelen toegekomen (buiten de extra camera) dus kan ik de voorlopige behuizing vervangen.
De problemen met de vorige behuizingen waren vooral reflecties in het beschermglas, niet waterbestendig, niet gekoeld en vooral veel problemen met leklicht. De PI4 die ik voor het project gebruik, heeft een zeer heldere rode LED op het moederbord dat zelf na afplakken nog steeds een rode schijn in de beelden opleverde daar ik opnames neem tot 1 minuut met een gain van 16.
Daarom heb ik volgende objectieven voor mijn nieuwe behuizing:
spatwater dicht
acryl koepel met hoge doorzichtigheid
koelrooster maar toch blokkeren van insekten
eenvoudig aansluitbaar (of USB of 240V stekker)
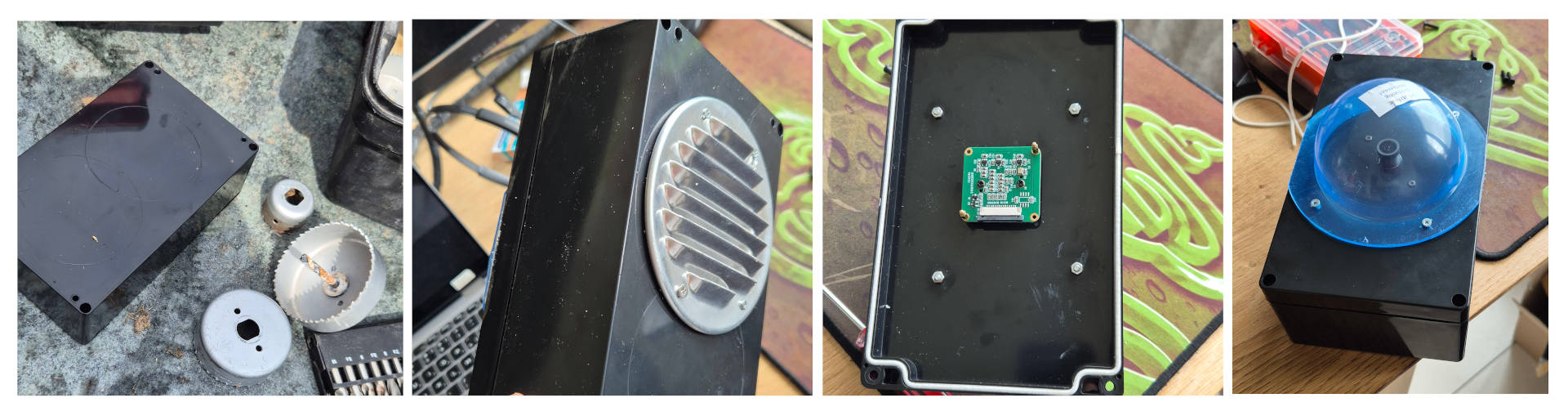
Uiteindelijk zal ik de onderstaande componenten gebruiken. Het kistje is een waterdicht kistje dat ik kocht op Amazon met IP65 van 200x120x75mm. Aan de onderzijde van het kistje maak ik een gat waarin ik een verluchtingsrooster plaats van 10cm die ik in de Brico kocht. Deze rooster moet ervoor zorgen dat er voldoende verluchting in het kistje komt, zodat de Allsky camera in volle zon geen oververhitting kan veroorzaken. Tegelijk laat deze rooster toe dat er voldoende verluchting in het kistje aanwezig is, en met de PI4 hoop ik op voldoende verwarming zodat condens geen probleem vormt. In het deksel maak ik een gat van 16 mm waar de lens van de camera net in past zodat alle licht van de PI4 mooi wordt geblokkeerd. Bovenop het desksel plaats ik een acryl koepeltje van Amazon met diameter 10cm. Voor de bevestiging van het printbord camera gebruik ik afstandsbussen van M2 (moeilijk te vinden) en voor de PI4 M3 afstandsbussen uit een oude computer. Hierdoor is alles makkelijk te wisselen. Bij de montage van de koepel, stel ik vast dat het koepeltje dan wel 10 cm diameter heeft, maar er is ook een ring rond de koepel die ruim over de zijkanten uitsteekt. Ik bevestig dan ook het koepeltje met boutjes en met een ijzerzaag zaag ik de zijkanten van het koepeltje die uitsteken mooi weg.
Daar ik voldoende plaats in het kistje heb, besluit ik eenvoudig een 220V-USB-C adaptor te plaatsen op een stroomkabel. Hierdoor wordt het kistje gewoon met 220V gevoed en heb ik geen problemen met de lengte van de USB. Deze USB-C adaptor kan tot 30W leveren, dus de PI4 zal geen probleem zijn.
Het enige wat me nu nog rest, is het aansluiten van de camera op de PI4 en het desksel monteren. Om het koepeltje te beschermen tegen water, spuit ik wat afdichtsilicone onder het koepeltje voordat ik deze aanspan op het kistje. De silicone verdeelt zich mooi bij het opspannen. Alhoewel de koepel dus waterdicht is en de camera nauw aansluit in het kistje, kan het altijd zijn dat er toch nog vocht onder de koepel zou komen. Mocht dit het geval zijn, dan ga ik gewoon een zakje vochtopslorper onder het koepeltje plaatsen. Dat is ook het geval bij mijn security camera’s die toch ook al jaren vochtvrij zijn gebleven.
Het eindresultaat mag er wel wezen (vind ik zelf). De eindlocatie van de camera zal beslist worden nadat het observatorium is verplaatst. De link is dus nog steeds: http://kawanda.mynetgear.com/allsky/ Als de nieuwe 12M camera zal toekomen, komt er misschien nog een deel3 indien de verschillen merkbaar zijn.
De laatste maanden waren zeer druk op het werk en hierdoor hebben al mijn projecten grote vertraging opgelopen. Enkele van de projecten waren het verplaatsen van het kleine observatorium (nu op terras), het installeren van een weerstation, opnieuw testen van mijn EQ5’s (eentje met goto en eentje met volgmotoren), de LXD75 herbekijken en het installeren van een Allsky camera.
Het snelste uit de lijst waren het weerstation en de Allsky camera.
Het weerstation is een VEVOR 7in1 WiFi Weather Station. De installatie is zeer eenvoudig en het monteren is een kwestie van 15 min. Omdat het nog niet duidelijk is waar ik die ga installeren, staat hij voorlopig op een oude basketbal paal. Om het station te koppelen aan het Internet moet je de basestation installeren. Deze kan dan met WeatherCloud of WeatherUnderground connecteren voor het zetten van de informatie op het Internet. Wel ben ik toch wat ontgoocheld omdat er geen API op het station zit. Het idee was vooral om dit station te gebruiken als waarschuwing via mijn Home Assistant installatie. Hiervoor zal ik dus nog wat extra tijd moeten uittrekken.
Voor de Allsky was de keuze eenvoudiger. Omdat ik nog enkele PI’s had liggen, wil ik gewoon een PI nemen met daarop een camera. Omdat ik fish-eye wil en toch wel redelijke kwaliteit, koop ik twee camera’s: IMX-327LQR (1920×1080, 2M, 148°) en een IMX-378-190 (4056 × 3040, 12M, 190°). Daar de IMX-378 met veel vertraging zal geleverd worden, start ik met de IMX-327. Bij het aansluiten op de PI3 (via camera poort), lukt het me niet om de software (eerst AllSky-Indi, dan Allsky) de camera te laten uitlezen. Omdat de PI3 toch wel zeer traag is, besluit ik een PI4 te gebruiken maar nog steeds geen succes. Het probleem blijkt nadien (na lezen van chinese manual en kleine lettertjes) dat de camera enkel via I2C werkt en je een driver in de boot van Linux moet activeren. Na het activeren van I2C en het bootscript aanpassen, werkt de camera ineens wel. Omdat ik dan al Allsky op de SD-card had staan, werk ik daarmee verder maar die AllSky-Indi leek me eigenlijk ook niet slecht.
De installatie van de Allsky software verloopt vlot maar het lukt me eerst niet om de website te activeren. Hostname problemen, router probleem, Telenet probleem en software problemen. Na een dagje rustig (vloekend) testen, begint de Allsky software nu wel te werken en kan ik de interface via het Internet benaderen. De Allsky web-interface biedt enkele leuke mogelijkheden zoals detectie van meteoren, een keogram (1 vertikale lijn van elke foto achter elkaar), video, star-trails en zelf een overlay functie waarbij je de sterren kan laten benoemen. Dat laatste vraagt wel veel tuning voor de correcte overlap, dus dat is voor de volgende keer. Nu moet ik natuurlijk de camera eens buiten proberen, maar gewoon de elektronica zonder bescherming buiten plaatsen, lijkt me toch eerder gewaagd. De kleine koepel die ik bestelde, is nog niet toegekomen maar omdat ik nog een defecte IP camera had liggen, gebruik ik de bovenkant bovenop een plastieke doos met veel duct-tape en is de testopstelling klaar.
Na het activeren van mijn Allsky camera (beperkte configuratie), heb ik wat rondgekeken bij andere Allsky camera’s en een leuke was iemand die extra informatie van ClearOutside had toegevoegd. Dat kan beter dacht ik, en met wat iframe getover, heb ik nu mijn Allsky site uitgebreid met het dashboard van mijn weerstation. Je krijgt dus nu de Allsky camera maar ook real-life weerinformatie (ook historisch).
De volgende stappen zijn dus:
Verder optimaliseren (en leren) van de Allsky software
Vervangen (na de levering) van het koepeltje voor de camera
na ontvangen van de IMX-378 met 190° de camera’s wisselen (hopelijk eenvoudig)
De vol automatische telescopen zijn telkens een interessante punt van discussie tijdens de vergaderingen. Is visueel observeren nog niet altijd sneller en makkelijker? Is de kwaliteit van die automatische systemen niet te slecht waardoor je mensen gaat ontgoochelen? Is zo’n automatische telescoop geen speelgoed?
Daarom heb ik mezelf opgelegd om op mijn blog de resultaten van de Seestar S50 te publiceren. Als astrofotograaf is de Seestar voor mij een aanvulling van mijn vaste fotografische installatie en het visueel observeren. Geen vervanger.
Enkele specs van de Seestar S50 – Triplet 50mm lens, f5 (of 250mm focal length) – CCD IMX462 (1080×1920) – interne dauwlint – interne autostacking – ingebouwde duo-band filter (OIII 30 nm, Ha 20nm) – Externe zonnefilter (bandpass 580-630nm) – 2.5kg met bluetooth/WiFi – interne schijf van 64GB – eigen batterij
Equisheim ligt op 7 km van Colmar dus lijkt niet ideaal voor astrofotografie en heeft een bortle 5 rating. Toch heb je dank zij de Vogezen een lichtarme hemel richting het noord-westen. Daarnaast is Eguisheim een prachtig middeleeuws dorp met leuke resto’s en vele ooievaren. We hebben ook de 5 kastelen op de heuvels en een uitgebreid netwerk van fietspaden die leiden naar prachtige vergezichten op de wijnvelden.
Een niet onbelangrijke troefkaart is toch wel het microklimaat van de regio. Door de aanwezigheid van de Vogezen, blijven de regenwolken hangen en is er veel meer kans op drogere en warme periodes.
Ons vast adres is dan ook de uithoek van de camping “Les troix chateau”, waar je kan genieten van enkele donkere hoeken.
Donderdagnacht zet ik de Seestar buiten en wil ik deze vergelijken met de AZ-GTI en DLSR. De Seestar heeft kuren en kan de gekende sterren niet vinden. Hierdoor kan ik mijn testen niet afronden en ga ik eerder in de diagnose van de problemen. Na wat controles, blijkt mijn tablet en zijn GPS het probleem. Als je op de Seestar aanlogt, dan heb je geen Internet. Geen Internet betekent dat de Seestar zijn GPS coördinaten niet kan ophalen. De oplossing is de Seestar applicatie op de tablet op te starten terwijl deze nog op Internet zit. De Seestar applicatie kan dan de coördinaten update’n en dan pas aanloggen op de Seestar. Terug bijgeleerd. De AZ-GTI heb ik niet echt onder handen gepakt dus daar is alles beperkt tot enkele opnames.
Vrijdagnacht zet ik de Seestar terug buiten en ga ik voor M81 en 20sec en laat ik alles 2 uur draaien. Op de eerste foto kan je de automatisch stacking vinden van de Seestar, terwijl ik op de tweede foto manueel heb gestacked met Siril.
Origineel export uit Seestar S50Siril nabewerking van de individuele frames
Tijdens de opnames valt me wel iets op en dat zijn voorbijtrekkende gordijnen. Met een zekere nieuwsgierigheid zet ik de DLSR op de wolken en neem een opname van 10sec. Tot mijn verbazing lijkt dit op het noorderlicht. Ik neem daarop nog enkele andere opnames en ga dan op het Internet kijken of het noorderlicht inderdaad zichtbaar is en ja.
Dinsdag 09 april hadden we een ledenvergadering met een presentatie rond een zelfbouw observatorium. Door de kleinere groep (5 leden) werd het een zeer interactieve vergadering.
Recentelijk heb ik me de Seestar S50 gekocht. Deze volautomatische telescoop heb ik aangekocht als een travelscope en voor snelle opnames bij minder ideaal weer.
Vanavond (19 maart) was er even een gat in de wolken, dus ideaal voor een first light. Daarom snel de Seestar buitengezet. Iets zoeken uit “what’s up this night” en we gaan naar M108 of de surfboard nebula in het sterrenbeeld grote beer. Hierbij moet je enkel maar ingeven dat je de M108 wil bekijken en automatisch gaat de Seestar S50 op zoek.
Wil je de opnames starten, dan zal de Seestar automatisch een 3-ster alignment doen, een focus en een image enhancer. Als je dan klikt op opnames, dan start de Seestar zijn opnames en op je gsm of tablet krijg je een stacked preview.
Omdat ik toch wel wil vergelijken, start ik eventueel mijn GSO 200f4 met de PlayerOne 585 Pro en richt ik deze ook op de M108. Alhoewel de EQ6R Pro normaal direct moet starten, moet ik toch heel wat stappen doorlopen om NiNA te overtuigen de opnames te starten. De seeing is niet ideaal en ik moet dan ook snel ook de opnames stoppen wegens wolken.
Ter vergelijk kan je hieronder het resultaat zien. Ik ben zwaar onder de indruk van de Seestar omdat bij een mindere seeing en een F4, het focuseren van de Newton niet ideaal werkt ondanks de NiNA focus procedure. Hieronder kan je de Seestar native zien, een zelf gestackte Seestar en de GSO.
Seestar 50S autostacking
Seestar 50S stacking met Siril
20sec x 119 = 40 min
GSO 200f4 stacking met Siril
180sec x 5 = 15 min (merk op, veel frameverlies)
Op 7 maart is het nog eens een open hemel dus dringend tijd om hiervan te profiteren.
Eerst probeer ik mijn oude EQ5 met de Nikon D90 met ED100 op te starten. Deze installatie start snel op maar zonder filters en met de D90 heb ik tot heden nog nooit de sweetspot kunnen vinden.
NGC1491 is een niet opvallende nevel maar die vlek in de nevel was de uitdaging. Bij het bekijken van de opnames bleek de blauw layer gewoon afwezig. Waarschijnlijk een nevel die veel integratietijd vraagt. Wat meer info: 3 min x 38 = bijna 2 uur opnames. (EQ5/ED100/D90/Kstars + Siril stacking + correcties in Gimp)
De M82 stond al een tijdje op mijn verlanglijstje omdat ik bij mijn vorige poging toch wat detail miste. Daarom iets meer opnames genomen. Voor deze opname gebruik ik de Newton 200F4 op de EQ6 met PlayerOne 585 met dual band filter. Wegens kuren met Win10 gaat heel wat tijd verloren. Ik krijg geen connectie met de mini-PC dus demonteren en dan blijkt de pc vast te zitten in een opstartscherm. Na het doorstarten blijkt dan ook nog de RealVNC registratie verdwenen. Opnieuw registreren dus en de miniPC is terug actief. Bij het starten van NiNA blijkt dan weer dat er een sync probleem bestaat met de EQ6R pro maar toch kan ik nog opnames maken. Uiteindelijk bleek de guidance toch niet slecht: RA: 0.50″ (0.10 px), DEC 0.39″ (0.08 px) totaal 0.63″ (0.13 px)
Uiteindelijk had ik 3 min x 80 = 4 uur opnames (EQ6Rpro/Newton200f4/PlayerOne585 + Siril stacking + correcties in Gimp)
Tijdens mijn vrije tijd probeer ik zoveel mogelijk de hobbies te combineren.
Daarom had ik tijdens het ski-verlof toch mijn oude Nikon D90 (astromodded) met de AZ-GTi meegenomen. Je weet maar nooit nietwaar.
De eerste avond krijg ik een uurtje tijd om de installatie te testen. Ik zet de AZ-GTi (Skywatcher goto) op terras in de equatoriale uitvoering. Onmiddelijk wordt mijn eerste probleem duidelijk. Het terras is gelegen met zicht op het prachtige dal van Saalbach maar op het zuiden. Hierdoor heb ik dus geen zicht op de poolster en polar alignment is een probleem. Na wat proberen (AZ-GTi met eqmod kabel op laptop), besluit ik te gaan voor de azimuth opstelling waarbij polar alignment stukken makkerlijk is. Eerste test lijkt te werken, maar wolken verplichten me uit te stellen.
De laatste avond blijkt het opnieuw een heldere hemel en het testen kan opnieuw beginnen. Ik zet de AZ-GTi dus in azimuth (gewoon op een foto-statief) en richt de lens van de DLSR horizontaal op het noorden (met compas). Met de 3 ster alignment kan ik nu de AZ-GTi calibereren. Wegens het beperkte zichtveld kan ik maar 2 van de 3 sterren in het proces effectief gebruiken. Een polar alignment is dus zeer ruw. Bij testen blijken de sterren tot 60 sec toch nog redelijk rond en de AZ-GTi heeft de “Freedom Find” functie waardoor hij intern dus een optisch rotatie-wiel heeft. Door dit optisch rotatie-wiel kan de AZ-GTi kleine rotatiefouten redelijk goed opvangen en is guiding minder noodzakelijk. De Snap poort (voor aansturen van een shutter release op een DLSR en Wifi maakt het pakket leuk als grab&go bij trekking.
Finale opstelling is dus: Nikon D90 met Tamron 80/200mm (of 2.8) lens via Snap poort op de AZ-GTi. AZ-GTi op een foto-statief in azimuth opstelling. (geen contra-gewicht tot 5 kg) en via WiFi en de Synscan app.
De twee pogingen zijn:
Orion nevel M42. 60 opnames van 1 minuut, 15 opnames bruikbaar en wegens de beeldrotatie is een sterke crop nodig. Ben niet zeker waarom 15 opnames wel ronde sterren hadden en de andere allemaal star-trails. Misschien slechte voeding ofwel teveel spanning op de rotatie-assen. Wordt verder onderzocht.
Rosetta nevel of NGC2244. Terug 60 opnames maar van de 60 opnames zijn minder dan 10 frames bruikbaar. Hierdoor is er veel te weinig materiaal om eigenlijk van een goede opname te spreken, maar het is mogelijk.
Eindconclusie: Het is dus inderdaad wel mogelijk om DSO astrofotografie te doen met beperkt materiaal, maar het is wel belangrijk iets meer tijd te investeren in een goede locatie (zie foto’s van de sneeuwruimer op de berg en het sterk verlichte hotel), een goede polar alignment, wat meer aandacht voor de opnametijd en gewoon meer tijd investeren tijdens opnames.















![SIMPLE = T / file does conform to FITS standard
BITPIX = -32 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 983 / length of data axis 1
NAXIS2 = 916 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
BZERO = 0 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
DATE = '2024-03-18T23:05:51' / UTC date that FITS file was created
DATE-OBS= '2024-03-18T21:35:24.514086' / YYYY-MM-DDThh:mm:ss observation start,
INSTRUME= 'Seestar S50' / instrument name
OBSERVER= ' ' / observer name
TELESCOP= 'Seestar S50' / telescope used to acquire this image
XPIXSZ = 2.9 / X pixel size microns
YPIXSZ = 2.9 / Y pixel size microns
XBINNING= 1 / Camera binning mode
YBINNING= 1 / Camera binning mode
FOCALLEN= 250 / Camera focal length
CCD-TEMP= 21.3125 / CCD temp in C
EXPTIME = 20 / Exposure time [s]
STACKCNT= 108 / Stack frames
LIVETIME= 2160 / Exposure time after deadtime correction
EXPSTART= 2.46039e+06 / Exposure start time (standard Julian date)
EXPEND = 2.46039e+06 / Exposure end time (standard Julian date)
FILTER = 'IRCUT ' / Active filter name
IMAGETYP= 'Light ' / Type of image
OBJECT = 'M 108 ' / Name of the object of interest
GAIN = 80 / Camera gain
SITELAT = 50.8308 / [deg] Observation site latitude
SITELONG= 4.83639 / [deg] Observation site longitude
RA = 168.246 / Image center Right Ascension (deg)
DEC = 55.5478 / Image center Declination (deg)
HISTORY mean stacking with winsorized sigma clipping rejection (low=3.000 high=3
HISTORY .000), additive+scaling normalized input, normalized output, no image we
HISTORY ighting, unequalized RGB
HISTORY Crop (x=59, y=467, w=983, h=916)
HISTORY Background neutralization
HISTORY GHS pivot: 0.003, amount: 13.55, local: 15.00 [0.00 1.00]
HISTORY GHS pivot: 0.151, amount: 14.50, local: 0.00 [0.00 1.00]
HISTORY GHS LINEAR BP: 0.08
HISTORY SCNR (type=average neutral, amount=1.00, preserve=true)
END](https://www.vvscapella.be/wp-content/gallery/seestar-2/M108.jpg "SIMPLE = T / file does conform to FITS standard
BITPIX = -32 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 983 / length of data axis 1
NAXIS2 = 916 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
BZERO = 0 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
DATE = '2024-03-18T23:05:51' / UTC date that FITS file was created
DATE-OBS= '2024-03-18T21:35:24.514086' / YYYY-MM-DDThh:mm:ss observation start,
INSTRUME= 'Seestar S50' / instrument name
OBSERVER= ' ' / observer name
TELESCOP= 'Seestar S50' / telescope used to acquire this image
XPIXSZ = 2.9 / X pixel size microns
YPIXSZ = 2.9 / Y pixel size microns
XBINNING= 1 / Camera binning mode
YBINNING= 1 / Camera binning mode
FOCALLEN= 250 / Camera focal length
CCD-TEMP= 21.3125 / CCD temp in C
EXPTIME = 20 / Exposure time [s]
STACKCNT= 108 / Stack frames
LIVETIME= 2160 / Exposure time after deadtime correction
EXPSTART= 2.46039e+06 / Exposure start time (standard Julian date)
EXPEND = 2.46039e+06 / Exposure end time (standard Julian date)
FILTER = 'IRCUT ' / Active filter name
IMAGETYP= 'Light ' / Type of image
OBJECT = 'M 108 ' / Name of the object of interest
GAIN = 80 / Camera gain
SITELAT = 50.8308 / [deg] Observation site latitude
SITELONG= 4.83639 / [deg] Observation site longitude
RA = 168.246 / Image center Right Ascension (deg)
DEC = 55.5478 / Image center Declination (deg)
HISTORY mean stacking with winsorized sigma clipping rejection (low=3.000 high=3
HISTORY .000), additive+scaling normalized input, normalized output, no image we
HISTORY ighting, unequalized RGB
HISTORY Crop (x=59, y=467, w=983, h=916)
HISTORY Background neutralization
HISTORY GHS pivot: 0.003, amount: 13.55, local: 15.00 [0.00 1.00]
HISTORY GHS pivot: 0.151, amount: 14.50, local: 0.00 [0.00 1.00]
HISTORY GHS LINEAR BP: 0.08
HISTORY SCNR (type=average neutral, amount=1.00, preserve=true)
END")
![SIMPLE = T / file does conform to FITS standard
BITPIX = -32 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 1119 / length of data axis 1
NAXIS2 = 724 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
MIPS-FHI= 1 / Upper visualization cutoff
MIPS-FLO= 0 / Lower visualization cutoff
BZERO = 0 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
DATE = '2024-05-11T21:11:26' / UTC date that FITS file was created
INSTRUME= ' ' / instrument name
OBSERVER= ' ' / observer name
TELESCOP= ' ' / telescope used to acquire this image
ROWORDER= 'TOP-DOWN' / Order of the rows in image array
XPIXSZ = 2.9 / X pixel size microns
YPIXSZ = 2.9 / Y pixel size microns
XBINNING= 1 / Camera binning mode
YBINNING= 1 / Camera binning mode
FOCALLEN= 252.061 / Camera focal length
CCD-TEMP= 0 / CCD temp in C
SET-TEMP= 0 / Temperature setting in C
EXPTIME = 10 / Exposure time [s]
STACKCNT= 360 / Stack frames
LIVETIME= 7200 / Exposure time after deadtime correction
EXPEND = 2.46044e+06 / Exposure end time (standard Julian date)
FILTER = 'mixed ' / Active filter name
CTYPE1 = 'RA---TAN' / Coordinate type for the first axis
CTYPE2 = 'DEC--TAN' / Coordinate type for the second axis
CUNIT1 = 'deg ' / Unit of coordinates
CUNIT2 = 'deg ' / Unit of coordinates
EQUINOX = 2000 / Equatorial equinox
OBJCTRA = '09 55 46.896' / Image center Right Ascension (hms)
OBJCTDEC= '+69 06 10.570' / Image center Declination (dms)
RA = 148.945 / Image center Right Ascension (deg)
DEC = 69.1029 / Image center Declination (deg)
CRPIX1 = 607.5 / Axis1 reference pixel
CRPIX2 = 331.5 / Axis2 reference pixel
CRVAL1 = 148.945 / Axis1 reference value (deg)
CRVAL2 = 69.1029 / Axis2 reference value (deg)
CDELT1 = -0.000659194 / X pixel size (deg)
CDELT2 = 0.000659199 / Y pixel size (deg)
PC1_1 = -0.917949 / Linear transformation matrix (1, 1)
PC1_2 = 0.396882 / Linear transformation matrix (1, 2)
PC2_1 = -0.396695 / Linear transformation matrix (2, 1)
PC2_2 = -0.917871 / Linear transformation matrix (2, 2)
PLTSOLVD= T / Siril internal solve
END](https://www.vvscapella.be/wp-content/gallery/seestar-2/M81.jpg "SIMPLE = T / file does conform to FITS standard
BITPIX = -32 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 1119 / length of data axis 1
NAXIS2 = 724 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
MIPS-FHI= 1 / Upper visualization cutoff
MIPS-FLO= 0 / Lower visualization cutoff
BZERO = 0 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
DATE = '2024-05-11T21:11:26' / UTC date that FITS file was created
INSTRUME= ' ' / instrument name
OBSERVER= ' ' / observer name
TELESCOP= ' ' / telescope used to acquire this image
ROWORDER= 'TOP-DOWN' / Order of the rows in image array
XPIXSZ = 2.9 / X pixel size microns
YPIXSZ = 2.9 / Y pixel size microns
XBINNING= 1 / Camera binning mode
YBINNING= 1 / Camera binning mode
FOCALLEN= 252.061 / Camera focal length
CCD-TEMP= 0 / CCD temp in C
SET-TEMP= 0 / Temperature setting in C
EXPTIME = 10 / Exposure time [s]
STACKCNT= 360 / Stack frames
LIVETIME= 7200 / Exposure time after deadtime correction
EXPEND = 2.46044e+06 / Exposure end time (standard Julian date)
FILTER = 'mixed ' / Active filter name
CTYPE1 = 'RA---TAN' / Coordinate type for the first axis
CTYPE2 = 'DEC--TAN' / Coordinate type for the second axis
CUNIT1 = 'deg ' / Unit of coordinates
CUNIT2 = 'deg ' / Unit of coordinates
EQUINOX = 2000 / Equatorial equinox
OBJCTRA = '09 55 46.896' / Image center Right Ascension (hms)
OBJCTDEC= '+69 06 10.570' / Image center Declination (dms)
RA = 148.945 / Image center Right Ascension (deg)
DEC = 69.1029 / Image center Declination (deg)
CRPIX1 = 607.5 / Axis1 reference pixel
CRPIX2 = 331.5 / Axis2 reference pixel
CRVAL1 = 148.945 / Axis1 reference value (deg)
CRVAL2 = 69.1029 / Axis2 reference value (deg)
CDELT1 = -0.000659194 / X pixel size (deg)
CDELT2 = 0.000659199 / Y pixel size (deg)
PC1_1 = -0.917949 / Linear transformation matrix (1, 1)
PC1_2 = 0.396882 / Linear transformation matrix (1, 2)
PC2_1 = -0.396695 / Linear transformation matrix (2, 1)
PC2_2 = -0.917871 / Linear transformation matrix (2, 2)
PLTSOLVD= T / Siril internal solve
END")

![SIMPLE = T / file does conform to FITS standard
BITPIX = -32 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 1858 / length of data axis 1
NAXIS2 = 1005 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
MIPS-FHI= 1 / Upper visualization cutoff
MIPS-FLO= 0 / Lower visualization cutoff
BZERO = 0 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
DATE = '2024-06-03T21:36:17' / UTC date that FITS file was created
DATE-OBS= '2024-03-24T19:42:24.784409' / YYYY-MM-DDThh:mm:ss observation start,
INSTRUME= 'Seestar S50' / instrument name
OBSERVER= ' ' / observer name
TELESCOP= 'Seestar S50' / telescope used to acquire this image
XPIXSZ = 2.9 / X pixel size microns
YPIXSZ = 2.9 / Y pixel size microns
XBINNING= 1 / Camera binning mode
YBINNING= 1 / Camera binning mode
FOCALLEN= 250 / Camera focal length
CCD-TEMP= 19.5625 / CCD temp in C
EXPTIME = 10 / Exposure time [s]
STACKCNT= 252 / Stack frames
LIVETIME= 2520 / Exposure time after deadtime correction
EXPSTART= 2.46039e+06 / Exposure start time (standard Julian date)
EXPEND = 2.46039e+06 / Exposure end time (standard Julian date)
FILTER = 'IRCUT ' / Active filter name
IMAGETYP= 'Light ' / Type of image
OBJECT = 'IC 434 ' / Name of the object of interest
GAIN = 80 / Camera gain
SITELAT = 50.8378 / [deg] Observation site latitude
SITELONG= 4.845 / [deg] Observation site longitude
RA = 85.6625 / Image center Right Ascension (deg)
DEC = -2.22889 / Image center Declination (deg)
HISTORY mean stacking with winsorized sigma clipping rejection (low=3.000 high=3
HISTORY .000), additive+scaling normalized input, normalized output, no image we
HISTORY ighting, unequalized RGB
HISTORY Crop (x=24, y=34, w=1858, h=1005)
HISTORY Rotation (90 deg)
HISTORY Rotation (90 deg)
HISTORY Rotation (90 deg)
HISTORY GHS pivot: 0.004, amount: 13.86, local: 15.00 [0.00 1.00]
HISTORY GHS pivot: 0.066, amount: 5.71, local: 0.00 [0.00 1.00]
HISTORY GHS LINEAR BP: 0.12
HISTORY GHS pivot: 0.207, amount: 8.58, local: 0.00 [0.00 1.00]
HISTORY GHS LINEAR BP: 0.28
HISTORY GHS LINEAR BP: 0.14
HISTORY GHS LINEAR BP: 0.08
HISTORY Saturation enhancement (amount=0.53)
HISTORY SCNR (type=average neutral, amount=1.00, preserve=true)
HISTORY SCNR (type=average neutral, amount=1.00, preserve=true)
END](https://www.vvscapella.be/wp-content/gallery/seestar-2/IC434.jpg "SIMPLE = T / file does conform to FITS standard
BITPIX = -32 / number of bits per data pixel
NAXIS = 3 / number of data axes
NAXIS1 = 1858 / length of data axis 1
NAXIS2 = 1005 / length of data axis 2
NAXIS3 = 3 / length of data axis 3
EXTEND = T / FITS dataset may contain extensions
COMMENT FITS (Flexible Image Transport System) format is defined in 'Astronomy
COMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359H
MIPS-FHI= 1 / Upper visualization cutoff
MIPS-FLO= 0 / Lower visualization cutoff
BZERO = 0 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
DATE = '2024-06-03T21:36:17' / UTC date that FITS file was created
DATE-OBS= '2024-03-24T19:42:24.784409' / YYYY-MM-DDThh:mm:ss observation start,
INSTRUME= 'Seestar S50' / instrument name
OBSERVER= ' ' / observer name
TELESCOP= 'Seestar S50' / telescope used to acquire this image
XPIXSZ = 2.9 / X pixel size microns
YPIXSZ = 2.9 / Y pixel size microns
XBINNING= 1 / Camera binning mode
YBINNING= 1 / Camera binning mode
FOCALLEN= 250 / Camera focal length
CCD-TEMP= 19.5625 / CCD temp in C
EXPTIME = 10 / Exposure time [s]
STACKCNT= 252 / Stack frames
LIVETIME= 2520 / Exposure time after deadtime correction
EXPSTART= 2.46039e+06 / Exposure start time (standard Julian date)
EXPEND = 2.46039e+06 / Exposure end time (standard Julian date)
FILTER = 'IRCUT ' / Active filter name
IMAGETYP= 'Light ' / Type of image
OBJECT = 'IC 434 ' / Name of the object of interest
GAIN = 80 / Camera gain
SITELAT = 50.8378 / [deg] Observation site latitude
SITELONG= 4.845 / [deg] Observation site longitude
RA = 85.6625 / Image center Right Ascension (deg)
DEC = -2.22889 / Image center Declination (deg)
HISTORY mean stacking with winsorized sigma clipping rejection (low=3.000 high=3
HISTORY .000), additive+scaling normalized input, normalized output, no image we
HISTORY ighting, unequalized RGB
HISTORY Crop (x=24, y=34, w=1858, h=1005)
HISTORY Rotation (90 deg)
HISTORY Rotation (90 deg)
HISTORY Rotation (90 deg)
HISTORY GHS pivot: 0.004, amount: 13.86, local: 15.00 [0.00 1.00]
HISTORY GHS pivot: 0.066, amount: 5.71, local: 0.00 [0.00 1.00]
HISTORY GHS LINEAR BP: 0.12
HISTORY GHS pivot: 0.207, amount: 8.58, local: 0.00 [0.00 1.00]
HISTORY GHS LINEAR BP: 0.28
HISTORY GHS LINEAR BP: 0.14
HISTORY GHS LINEAR BP: 0.08
HISTORY Saturation enhancement (amount=0.53)
HISTORY SCNR (type=average neutral, amount=1.00, preserve=true)
HISTORY SCNR (type=average neutral, amount=1.00, preserve=true)
END")









![SIMPLE = T / file does conform to FITS standardBITPIX = 20 / number of bits per data pixelNAXIS = 3 / number of data axesNAXIS1 = 1080 / length of data axis 1NAXIS2 = 1920 / length of data axis 2NAXIS3 = 3 / length of data axis 3EXTEND = T / FITS dataset may contain extensionsCOMMENT FITS (Flexible Image Transport System) format is defined in 'AstronomyCOMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359HBZERO = 0 / offset data range to that of unsigned shortBSCALE = 1 / default scaling factorDATE = '2024-03-18T23:00:49' / UTC date that FITS file was createdDATE-OBS= '2024-03-18T22:37:34.859890' / YYYY-MM-DDThh:mm:ss observation start, INSTRUME= 'Seestar S50' / instrument nameOBSERVER= ' ' / observer nameTELESCOP= 'Seestar S50' / telescope used to acquire this imageXPIXSZ = 2.9 / X pixel size micronsYPIXSZ = 2.9 / Y pixel size micronsXBINNING= 1 / Camera binning modeYBINNING= 1 / Camera binning modeBAYERPAT= 'GRBG ' / Bayer color patternFOCALLEN= 250 / Camera focal lengthCCD-TEMP= 17.125 / CCD temp in CEXPTIME = 20 / Exposure time [s]STACKCNT= 119 / Stack framesFILTER = 'IRCUT ' / Active filter nameIMAGETYP= 'Light ' / Type of imageOBJECT = 'M 108 ' / Name of the object of interestGAIN = 80 / Camera gainSITELAT = 50.8308 / [deg] Observation site latitudeSITELONG= 4.83639 / [deg] Observation site longitudeRA = 168.246 / Image center Right Ascension (deg)DEC = 55.5478 / Image center Declination (deg)CRPIX1 = 331.959 / Axis1 reference pixelCRPIX2 = 457.781 / Axis2 reference pixelCRVAL1 = 167.282 / Axis1 reference value (deg)CRVAL2 = 55.7732 / Axis2 reference value (deg)CDELT1 = 0.000659604 / X pixel size (deg)CDELT2 = 0.000658743 / Y pixel size (deg)PC1_1 = 0.133103 / Linear transformation matrix (1, 1)PC1_2 = 0.989707 / Linear transformation matrix (1, 2)PC2_1 = -0.992398 / Linear transformation matrix (2, 1)PC2_2 = 0.133855 / Linear transformation matrix (2, 2)HISTORY GHS pivot: 0.019, amount: 9.63, local: 15.00 [0.00 1.00]HISTORY GHS LINEAR BP: 0.09HISTORY GHS pivot: 0.212, amount: 25.14, local: 0.00 [0.00 1.00]HISTORY GHS LINEAR BP: 0.07END](https://www.vvscapella.be/wp-content/gallery/seestar/M108_autostack.jpg "SIMPLE = T / file does conform to FITS standardBITPIX = 20 / number of bits per data pixelNAXIS = 3 / number of data axesNAXIS1 = 1080 / length of data axis 1NAXIS2 = 1920 / length of data axis 2NAXIS3 = 3 / length of data axis 3EXTEND = T / FITS dataset may contain extensionsCOMMENT FITS (Flexible Image Transport System) format is defined in 'AstronomyCOMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359HBZERO = 0 / offset data range to that of unsigned shortBSCALE = 1 / default scaling factorDATE = '2024-03-18T23:00:49' / UTC date that FITS file was createdDATE-OBS= '2024-03-18T22:37:34.859890' / YYYY-MM-DDThh:mm:ss observation start, INSTRUME= 'Seestar S50' / instrument nameOBSERVER= ' ' / observer nameTELESCOP= 'Seestar S50' / telescope used to acquire this imageXPIXSZ = 2.9 / X pixel size micronsYPIXSZ = 2.9 / Y pixel size micronsXBINNING= 1 / Camera binning modeYBINNING= 1 / Camera binning modeBAYERPAT= 'GRBG ' / Bayer color patternFOCALLEN= 250 / Camera focal lengthCCD-TEMP= 17.125 / CCD temp in CEXPTIME = 20 / Exposure time [s]STACKCNT= 119 / Stack framesFILTER = 'IRCUT ' / Active filter nameIMAGETYP= 'Light ' / Type of imageOBJECT = 'M 108 ' / Name of the object of interestGAIN = 80 / Camera gainSITELAT = 50.8308 / [deg] Observation site latitudeSITELONG= 4.83639 / [deg] Observation site longitudeRA = 168.246 / Image center Right Ascension (deg)DEC = 55.5478 / Image center Declination (deg)CRPIX1 = 331.959 / Axis1 reference pixelCRPIX2 = 457.781 / Axis2 reference pixelCRVAL1 = 167.282 / Axis1 reference value (deg)CRVAL2 = 55.7732 / Axis2 reference value (deg)CDELT1 = 0.000659604 / X pixel size (deg)CDELT2 = 0.000658743 / Y pixel size (deg)PC1_1 = 0.133103 / Linear transformation matrix (1, 1)PC1_2 = 0.989707 / Linear transformation matrix (1, 2)PC2_1 = -0.992398 / Linear transformation matrix (2, 1)PC2_2 = 0.133855 / Linear transformation matrix (2, 2)HISTORY GHS pivot: 0.019, amount: 9.63, local: 15.00 [0.00 1.00]HISTORY GHS LINEAR BP: 0.09HISTORY GHS pivot: 0.212, amount: 25.14, local: 0.00 [0.00 1.00]HISTORY GHS LINEAR BP: 0.07END")
![SIMPLE = T / file does conform to FITS standardBITPIX = -32 / number of bits per data pixelNAXIS = 3 / number of data axesNAXIS1 = 983 / length of data axis 1NAXIS2 = 916 / length of data axis 2NAXIS3 = 3 / length of data axis 3EXTEND = T / FITS dataset may contain extensionsCOMMENT FITS (Flexible Image Transport System) format is defined in 'AstronomyCOMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359HBZERO = 0 / offset data range to that of unsigned shortBSCALE = 1 / default scaling factorDATE = '2024-03-18T23:05:51' / UTC date that FITS file was createdDATE-OBS= '2024-03-18T21:35:24.514086' / YYYY-MM-DDThh:mm:ss observation start, INSTRUME= 'Seestar S50' / instrument nameOBSERVER= ' ' / observer nameTELESCOP= 'Seestar S50' / telescope used to acquire this imageXPIXSZ = 2.9 / X pixel size micronsYPIXSZ = 2.9 / Y pixel size micronsXBINNING= 1 / Camera binning modeYBINNING= 1 / Camera binning modeFOCALLEN= 250 / Camera focal lengthCCD-TEMP= 21.3125 / CCD temp in CEXPTIME = 20 / Exposure time [s]STACKCNT= 108 / Stack framesLIVETIME= 2160 / Exposure time after deadtime correctionEXPSTART= 2.46039e+06 / Exposure start time (standard Julian date)EXPEND = 2.46039e+06 / Exposure end time (standard Julian date)FILTER = 'IRCUT ' / Active filter nameIMAGETYP= 'Light ' / Type of imageOBJECT = 'M 108 ' / Name of the object of interestGAIN = 80 / Camera gainSITELAT = 50.8308 / [deg] Observation site latitudeSITELONG= 4.83639 / [deg] Observation site longitudeRA = 168.246 / Image center Right Ascension (deg)DEC = 55.5478 / Image center Declination (deg)HISTORY mean stacking with winsorized sigma clipping rejection (low=3.000 high=3HISTORY .000), additive+scaling normalized input, normalized output, no image weHISTORY ighting, unequalized RGBHISTORY Crop (x=59, y=467, w=983, h=916)HISTORY Background neutralizationHISTORY GHS pivot: 0.003, amount: 13.55, local: 15.00 [0.00 1.00]HISTORY GHS pivot: 0.151, amount: 14.50, local: 0.00 [0.00 1.00]HISTORY GHS LINEAR BP: 0.08HISTORY SCNR (type=average neutral, amount=1.00, preserve=true)END](https://www.vvscapella.be/wp-content/gallery/seestar/M108Selfstacked.jpg "SIMPLE = T / file does conform to FITS standardBITPIX = -32 / number of bits per data pixelNAXIS = 3 / number of data axesNAXIS1 = 983 / length of data axis 1NAXIS2 = 916 / length of data axis 2NAXIS3 = 3 / length of data axis 3EXTEND = T / FITS dataset may contain extensionsCOMMENT FITS (Flexible Image Transport System) format is defined in 'AstronomyCOMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359HBZERO = 0 / offset data range to that of unsigned shortBSCALE = 1 / default scaling factorDATE = '2024-03-18T23:05:51' / UTC date that FITS file was createdDATE-OBS= '2024-03-18T21:35:24.514086' / YYYY-MM-DDThh:mm:ss observation start, INSTRUME= 'Seestar S50' / instrument nameOBSERVER= ' ' / observer nameTELESCOP= 'Seestar S50' / telescope used to acquire this imageXPIXSZ = 2.9 / X pixel size micronsYPIXSZ = 2.9 / Y pixel size micronsXBINNING= 1 / Camera binning modeYBINNING= 1 / Camera binning modeFOCALLEN= 250 / Camera focal lengthCCD-TEMP= 21.3125 / CCD temp in CEXPTIME = 20 / Exposure time [s]STACKCNT= 108 / Stack framesLIVETIME= 2160 / Exposure time after deadtime correctionEXPSTART= 2.46039e+06 / Exposure start time (standard Julian date)EXPEND = 2.46039e+06 / Exposure end time (standard Julian date)FILTER = 'IRCUT ' / Active filter nameIMAGETYP= 'Light ' / Type of imageOBJECT = 'M 108 ' / Name of the object of interestGAIN = 80 / Camera gainSITELAT = 50.8308 / [deg] Observation site latitudeSITELONG= 4.83639 / [deg] Observation site longitudeRA = 168.246 / Image center Right Ascension (deg)DEC = 55.5478 / Image center Declination (deg)HISTORY mean stacking with winsorized sigma clipping rejection (low=3.000 high=3HISTORY .000), additive+scaling normalized input, normalized output, no image weHISTORY ighting, unequalized RGBHISTORY Crop (x=59, y=467, w=983, h=916)HISTORY Background neutralizationHISTORY GHS pivot: 0.003, amount: 13.55, local: 15.00 [0.00 1.00]HISTORY GHS pivot: 0.151, amount: 14.50, local: 0.00 [0.00 1.00]HISTORY GHS LINEAR BP: 0.08HISTORY SCNR (type=average neutral, amount=1.00, preserve=true)END")
![SIMPLE = T / file does conform to FITS standardBITPIX = -32 / number of bits per data pixelNAXIS = 3 / number of data axesNAXIS1 = 3611 / length of data axis 1NAXIS2 = 2032 / length of data axis 2NAXIS3 = 3 / length of data axis 3EXTEND = T / FITS dataset may contain extensionsCOMMENT FITS (Flexible Image Transport System) format is defined in 'AstronomyCOMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359HBZERO = 0 / offset data range to that of unsigned shortBSCALE = 1 / default scaling factorDATE = '2024-03-18T22:53:19' / UTC date that FITS file was createdDATE-OBS= '2024-03-18T22:14:58.332000' / YYYY-MM-DDThh:mm:ss observation start, INSTRUME= 'Uranus-C PRO' / instrument nameOBSERVER= ' ' / observer nameTELESCOP= 'GSO 8" Newton' / telescope used to acquire this imageROWORDER= 'TOP-DOWN' / Order of the rows in image arrayXPIXSZ = 2.9 / X pixel size micronsYPIXSZ = 2.9 / Y pixel size micronsXBINNING= 1 / Camera binning modeYBINNING= 1 / Camera binning modeFOCALLEN= 800 / Camera focal lengthCCD-TEMP= -10 / CCD temp in CSET-TEMP= -10 / Temperature setting in CEXPTIME = 180 / Exposure time [s]STACKCNT= 5 / Stack framesLIVETIME= 900 / Exposure time after deadtime correctionEXPSTART= 2.46039e+06 / Exposure start time (standard Julian date)EXPEND = 2.46039e+06 / Exposure end time (standard Julian date)FILTER = 'Filter1 ' / Active filter nameIMAGETYP= 'LIGHT ' / Type of imageOBJECT = 'M 108 ' / Name of the object of interestGAIN = 210 / Camera gainOFFSET = 50 / Camera offsetSITELAT = 50.23 / [deg] Observation site latitudeSITELONG= 4.42 / [deg] Observation site longitudeSITEELEV= 85 / [m] Observation site elevationCTYPE1 = 'RA---TAN' / Coordinate type for the first axisCTYPE2 = 'DEC--TAN' / Coordinate type for the second axisCUNIT1 = 'deg ' / Unit of coordinatesCUNIT2 = 'deg ' / Unit of coordinatesEQUINOX = 2000 / Equatorial equinoxOBJCTRA = '11 11 31' / Image center Right Ascension (hms)OBJCTDEC= '+55 40 27' / Image center Declination (dms)RA = 135.12 / Image center Right Ascension (deg)DEC = 56.8698 / Image center Declination (deg)AIRMASS = 1.03815 / AirmassHISTORY mean stacking with winsorized sigma clipping rejection (low=3.000 high=3HISTORY .000), additive+scaling normalized input, normalized output, no image weHISTORY ighting, unequalized RGBHISTORY Crop (x=133, y=84, w=3611, h=2032)HISTORY Background neutralizationHISTORY GHS pivot: 0.012, amount: 7.63, local: 15.00 [0.00 1.00]HISTORY GHS LINEAR BP: 0.05HISTORY GHS pivot: 0.243, amount: 9.20, local: 0.00 [0.00 1.00]HISTORY GHS LINEAR BP: 0.04HISTORY SCNR (type=average neutral, amount=1.00, preserve=true)END](https://www.vvscapella.be/wp-content/gallery/seestar/M108_newton.jpg "SIMPLE = T / file does conform to FITS standardBITPIX = -32 / number of bits per data pixelNAXIS = 3 / number of data axesNAXIS1 = 3611 / length of data axis 1NAXIS2 = 2032 / length of data axis 2NAXIS3 = 3 / length of data axis 3EXTEND = T / FITS dataset may contain extensionsCOMMENT FITS (Flexible Image Transport System) format is defined in 'AstronomyCOMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359HBZERO = 0 / offset data range to that of unsigned shortBSCALE = 1 / default scaling factorDATE = '2024-03-18T22:53:19' / UTC date that FITS file was createdDATE-OBS= '2024-03-18T22:14:58.332000' / YYYY-MM-DDThh:mm:ss observation start, INSTRUME= 'Uranus-C PRO' / instrument nameOBSERVER= ' ' / observer nameTELESCOP= 'GSO 8\" Newton' / telescope used to acquire this imageROWORDER= 'TOP-DOWN' / Order of the rows in image arrayXPIXSZ = 2.9 / X pixel size micronsYPIXSZ = 2.9 / Y pixel size micronsXBINNING= 1 / Camera binning modeYBINNING= 1 / Camera binning modeFOCALLEN= 800 / Camera focal lengthCCD-TEMP= -10 / CCD temp in CSET-TEMP= -10 / Temperature setting in CEXPTIME = 180 / Exposure time [s]STACKCNT= 5 / Stack framesLIVETIME= 900 / Exposure time after deadtime correctionEXPSTART= 2.46039e+06 / Exposure start time (standard Julian date)EXPEND = 2.46039e+06 / Exposure end time (standard Julian date)FILTER = 'Filter1 ' / Active filter nameIMAGETYP= 'LIGHT ' / Type of imageOBJECT = 'M 108 ' / Name of the object of interestGAIN = 210 / Camera gainOFFSET = 50 / Camera offsetSITELAT = 50.23 / [deg] Observation site latitudeSITELONG= 4.42 / [deg] Observation site longitudeSITEELEV= 85 / [m] Observation site elevationCTYPE1 = 'RA---TAN' / Coordinate type for the first axisCTYPE2 = 'DEC--TAN' / Coordinate type for the second axisCUNIT1 = 'deg ' / Unit of coordinatesCUNIT2 = 'deg ' / Unit of coordinatesEQUINOX = 2000 / Equatorial equinoxOBJCTRA = '11 11 31' / Image center Right Ascension (hms)OBJCTDEC= '+55 40 27' / Image center Declination (dms)RA = 135.12 / Image center Right Ascension (deg)DEC = 56.8698 / Image center Declination (deg)AIRMASS = 1.03815 / AirmassHISTORY mean stacking with winsorized sigma clipping rejection (low=3.000 high=3HISTORY .000), additive+scaling normalized input, normalized output, no image weHISTORY ighting, unequalized RGBHISTORY Crop (x=133, y=84, w=3611, h=2032)HISTORY Background neutralizationHISTORY GHS pivot: 0.012, amount: 7.63, local: 15.00 [0.00 1.00]HISTORY GHS LINEAR BP: 0.05HISTORY GHS pivot: 0.243, amount: 9.20, local: 0.00 [0.00 1.00]HISTORY GHS LINEAR BP: 0.04HISTORY SCNR (type=average neutral, amount=1.00, preserve=true)END")



![SIMPLE = T / file does conform to FITS standardBITPIX = -32 / number of bits per data pixelNAXIS = 3 / number of data axesNAXIS1 = 2241 / length of data axis 1NAXIS2 = 1363 / length of data axis 2NAXIS3 = 3 / length of data axis 3EXTEND = T / FITS dataset may contain extensionsCOMMENT FITS (Flexible Image Transport System) format is defined in 'AstronomyCOMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359HMIPS-FHI= 1 / Upper visualization cutoffMIPS-FLO= 0 / Lower visualization cutoffBZERO = 0 / offset data range to that of unsigned shortBSCALE = 1 / default scaling factorDATE = '2024-03-08T21:25:00' / UTC date that FITS file was createdDATE-OBS= '2024-03-07T21:56:17' / YYYY-MM-DDThh:mm:ss observation start, UTINSTRUME= 'Nikon D90' / instrument nameOBSERVER= ' ' / observer nameTELESCOP= ' ' / telescope used to acquire this imageROWORDER= 'BOTTOM-UP' / Order of the rows in image arrayXBINNING= 2 / Camera binning modeYBINNING= 2 / Camera binning modeCCD-TEMP= 0 / CCD temp in CSET-TEMP= 0 / Temperature setting in CEXPTIME = 180.1 / Exposure time [s]STACKCNT= 38 / Stack framesLIVETIME= 6843.8 / Exposure time after deadtime correctionEXPSTART= 2.46038e+06 / Exposure start time (standard Julian date)EXPEND = 2.46038e+06 / Exposure end time (standard Julian date)FILTER = 'mixed ' / Active filter nameISOSPEED= 1600 / ISO camera settingHISTORY Crop (x=764, y=727, w=2241, h=1363)HISTORY Background neutralizationHISTORY Background extraction (Correction: Subtraction)HISTORY GHS LINEAR BP: 0.06END](https://www.vvscapella.be/wp-content/gallery/henk080324/NGC1491.jpg "SIMPLE = T / file does conform to FITS standardBITPIX = -32 / number of bits per data pixelNAXIS = 3 / number of data axesNAXIS1 = 2241 / length of data axis 1NAXIS2 = 1363 / length of data axis 2NAXIS3 = 3 / length of data axis 3EXTEND = T / FITS dataset may contain extensionsCOMMENT FITS (Flexible Image Transport System) format is defined in 'AstronomyCOMMENT and Astrophysics', volume 376, page 359; bibcode: 2001A&A...376..359HMIPS-FHI= 1 / Upper visualization cutoffMIPS-FLO= 0 / Lower visualization cutoffBZERO = 0 / offset data range to that of unsigned shortBSCALE = 1 / default scaling factorDATE = '2024-03-08T21:25:00' / UTC date that FITS file was createdDATE-OBS= '2024-03-07T21:56:17' / YYYY-MM-DDThh:mm:ss observation start, UTINSTRUME= 'Nikon D90' / instrument nameOBSERVER= ' ' / observer nameTELESCOP= ' ' / telescope used to acquire this imageROWORDER= 'BOTTOM-UP' / Order of the rows in image arrayXBINNING= 2 / Camera binning modeYBINNING= 2 / Camera binning modeCCD-TEMP= 0 / CCD temp in CSET-TEMP= 0 / Temperature setting in CEXPTIME = 180.1 / Exposure time [s]STACKCNT= 38 / Stack framesLIVETIME= 6843.8 / Exposure time after deadtime correctionEXPSTART= 2.46038e+06 / Exposure start time (standard Julian date)EXPEND = 2.46038e+06 / Exposure end time (standard Julian date)FILTER = 'mixed ' / Active filter nameISOSPEED= 1600 / ISO camera settingHISTORY Crop (x=764, y=727, w=2241, h=1363)HISTORY Background neutralizationHISTORY Background extraction (Correction: Subtraction)HISTORY GHS LINEAR BP: 0.06END")






