Intussen is het ook al weer bijna twee weken geleden dat ik vanuit het mini-observatorium first-light opnames heb gemaakt.
Sinds 2 dec heb ik telkens met het idee gespeeld om de telescoop terug binnen te zetten om zo de invloed van de vochtige lucht te verminderen.
Uiteindelijk is het demonteren en monteren toch niet zo handig (wegen kleine ruimte) en ben ik toch maar met een verwarmingslus gaan werken.
Op het Internet kon ik een 16 Watt verwarmingslus vinden voor reptielen zodat ik niet de antidauw linten continue moet aansturen. Het is een eerste stap.
Nu natuurlijk de vraag of ik de verwarmingslus niet op een intelligent manier kan aansturen en daar komt microPython en Pycom/ESP32 in het spel.
Als ik nu een Pycom met vochtigheidsensor en temperatuurmeter koppel aan mijn huisdomotica …..
Zo gezegd is gedaan. Even in Home Assistant kijken hoe ik de Pycom via MQTT kan aansturen en dan wat coderen.
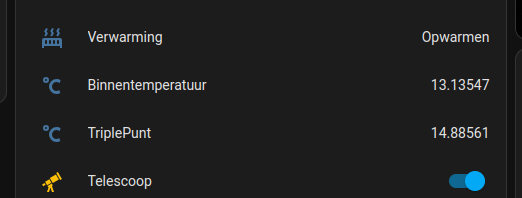
Na een avondje brollen, krijg ik het onderstaande scherm waarbij ik dus vanuit mijn domotica de verwarming kan opzetten, de binnentemperatuur kan
meten evenals het triplepunt kan opvragen (gaat vocht neerslaan). Als ik nu wat logica inbouw, dan zal de verwarming opspringen als triplepunt > binnentermperatuur.
Op basis daarvan kan ik dan de voeding (12V) van de telescoop inschakelen of kan ik het stopcontact van de verwarming automatisch inschakelen.
Dus kan ik nog kiezen tussen inschakelen van de dauwlinten of reptielenlint.
Enkele recente opnames vanuit het mini observatorium










